Tball v1.0 LED升降球&激光追踪软件发布说明
{kind=link}
Tball是锐意光研专为激光跟踪LED升降球而研发的软件。Tball是完全基于三维物理空间算法做的激光追踪。可以基于不同灯具的升降速度进行追踪,因此相当于基于四维参数(三维位置加机械性能参数)进行精确追踪。
系统亮点:
- 硬件方面,Tball同样是直接与Beyond对接,把激光数据输出给Beyond相应的Zone,因此连接激光使用的也是Beyond官方的硬件,FB3或FB4盒子。
- 软件方面,Tball支持Artnet信号输入输出,输入信号用于实时计算LED球的三维位置并输出跟踪点到各个激光灯,输出信号用于调试时直接进行效果测试。支持使用D2或D3软件进行模拟渲染。默认LED升降球的通道表就是使用Depence内置的升降球灯库,当然你也可以根据情况进行修改通道映射。
因为软件是基于三维物理空间算法实现的激光追踪,因此在现场调试时,你需要借助激光测距仪来精确测量升降球的吊装位置以及每台激光灯振镜的三维位置与角度。
在软件中可以对升降球组进行线性,网格,环形排列,也可以对每个升降球进行单独的位置微调。
{kind=link}
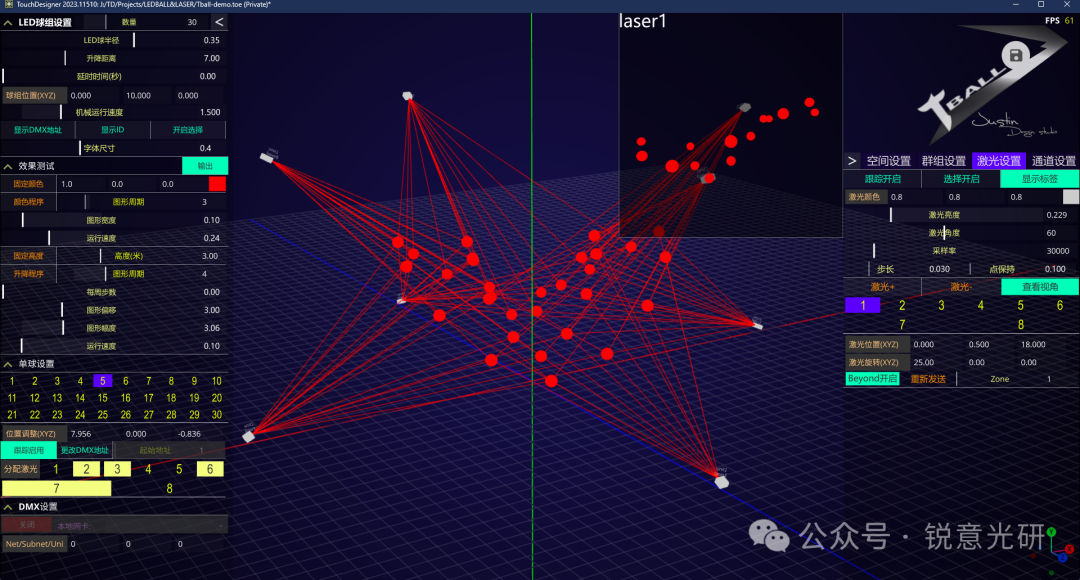
首先讲一下本软件是按Artnet域(Universe)来划分群组,一个域(即512个通道)一个群组,每个群组包括LED球与追踪这些LED球的激光灯以及相关参数。如果遇到需要使用同一激光灯进行跨域追踪的话,你只需要在不同的群组中为相同位置的激光灯分配同一Beyond输出Zone即可。软件左侧为LED球组调试区域,中间是效果预览画面,右侧为群组设置,输出设置与界面相关设置。右上方为LOGO区域,右上角为软件运行帧率,要确保电脑硬件配置可以满足在30FPS以上的帧率运行本软件。Logo圆圈处为项目保存按钮,你可以手动保存项目文件。软件右下角为坐标系导航图标,本软件的坐标系为右手坐标系(即蓝色Z轴向操作人员为正),与Depence的左手坐标系Z轴方向是相反的,因此在使用depence进行软件模拟时,Z轴坐标位置要进行相应的取反操作。
对于Depence模拟我会提供相应的示例文件,内置有相应修改过的升降球灯库以及激光灯灯库,你也可以对比一下Tball软件中的灯具位置以及相应旋转参数作为参考。
在软件左右参数调整区域中,你可以手动点击所有白色标题栏最左侧的上下箭头按钮来展开或折叠相应部分的参数。左右顶部标题栏相应外侧的左右箭头按钮用来显示或隐藏所有相应部分的参数。整个界面拥有青绿色的按钮都是开关型按钮,橙色的按钮是点控型按钮,比如固定颜色按钮就是点控型按钮。土黄色文本为参数标签,浅黄色按钮为多选按钮,黄色文本紫色背景的按钮为单选按钮。紫色参数为全局统一的参数,如本地网卡选择。对于所有数值调整型参数,你都可以使用滚动鼠标轮进行调整,当然你也可以在相应的数值区域手动输入数据,在相应数值输入栏中长按鼠标左键可以触发相应的差值调整菜单,把鼠标放在相应的调整差值区域可以左右调整相应的数值。当你在这些参数滑块区域上右击时,相应的参数会自动重置为其默认值。
对于中间三维视图的操作与其它三维软件有很多相似之处。你可以使用鼠标滚轮对视图进行缩放,按住右键可以平移视图,鼠标左键可以对视图进行旋转查看。在相应选择选项开启时你也可以使用鼠标来选择激光灯与LED升降球并进行相应的参数调整。
键盘操作方式与游戏引擎类似,ASDW键进行相应的左后右前移动视角,QE键上下移动,H键为Home视角,LRT分别为左右顶视图。软件右侧区域中的空间设置中,可以切换坐标轴显示与隐藏,包括UI相关参数调整,这里就不进行赘述了。这里的保存项目名称栏中,可以输入你想保存的文件名,点击保存图标后即会在项目所在文件夹中保存为相应的文件名称,下次直接双击这个文件即可打开相应的项目。
调试流程
{kind=link}
1. 打开软件默认就有一个群组1,有关群组的设置你可以在界面右侧的群组设置中找到。点击群组+按钮可以添加群组,群组-按钮将会删除大于1的群组。你可以在左侧LED球组设置栏右侧来调整群组1内LED升降球的数量,当然每个群组内LED升降球占用的通道数不能超过512个通道,这个要注意。群组位置参数即当前群组的全局坐标原点,所有群组内的LED升降球与激光灯的位置都是基于这个位置进行调整的。默认为坐标原点,在你现场进行调试时,也要首先确定这个坐标原点位置,毕竟这关系到LED升降球与激光灯的坐标位置测量。调整群组旋转部分的参数,将会对群组内所有LED升降球与激光灯以群组坐标为基准进行旋转。接下来是对群组内LED球的排列操作,在激活全选按钮时,选择范围栏是被屏蔽的,这时将会对群组内所有LED球进行排列。如果你只想对群组内部分LED球进行排列操作,可以取消激活全选按钮,并在选择范围栏内输入选择的范围,如1-10即对群组内ID编号1-10的LED升降球进行排列操作。
调整相应的X轴与Z轴范围后,点击线性布局即可在相应坐标轴上的指定范围内进行线性排列,如设置X轴排列范围为10即在X轴的-5至5米的范围内进行排列。
如要进行网格排列,可以先调整好网格排列列数,再点击相应的网格排列按钮,注意,相应的X轴与Z轴排列范围也要进行相应的调整,如此可在指定范围内进行网格型排列。
对于圆形排列,你只需要调整好圆形排列环数,基准半径与半径偏移,再点击圆形布局即可。
{kind=link}
2. 排列好LED升降球后,接下来可以设置界面左侧升降球相关的参数。
你要确保一个群组内所有LED升降球的升降距离与速度是一致的,因为LED球组设置部分所有参数都是全局性的参数,如果你的升降球离控台区域比较远的话,就可能会有相应的信号延迟,这时你可以调整延时时间来使激光信号与升降球的信号进行匹配,通常在depence中进行模拟时可以保持这个延时参数为0。
每一组LED升降球都可以通过球组位置选项来调整球组的全局吊装位置,主要是调整Y轴即高度值,这个高度值即升降球完全升起时球心的位置高度。现场调试时只需要测得球底部高度值加上球的半径即可。在depence中,你可以在升降球的位置放置一个球对象以获取实际球实际的高度。机械运行速度单位是米每秒。在depence中你可以在相应灯具的设置选项中找到。接着是三个开关按钮可以切换在三维视图中显示每个球的ID与DMX地址,当开启选择时,你就可以使用鼠标直接选择单个球来设置相应的参数。字体尺寸即ID与DMX地址的字体大小。
{kind=link}
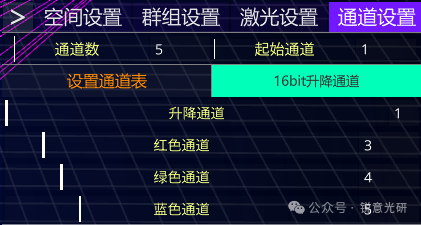
3. 接下来我们来设置一下升降球通道表映射。默认升降球的通道数为5通道,是以depence中的升降球灯库为参考的,默认LED升降球群组的起始通道为1,16bit升降通道开启时会自动设置升降通道的精调通道为升降通道的下一个通道,如默认升降通道为1,16bit精调通道为2,你可以基于实际使用的灯具通道表来对其余相关通道进行映射,设置好后,点击一下设置通道表按钮即可完成通道表的映射。
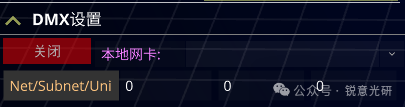
4. 通道表映射设置好后,如果你的电脑接有ARTNET盒子直接可以控制实际的升降球的话,你就可以直接使用界面左侧的效果测试区域,点击激活输出按钮以启用发送ARTNET信号,通常是不需要指定本地网卡的,如果输出不正常的话可以先关闭输出,指定一下输出信号的网卡。一旦开启输出按钮,最下方的DMX设置部分输入启用按钮将处于关闭状态且本地网卡选项将不可用。ARTNET网卡是全局性的参数。下面的Net/Subnet/Uni则是可以为每个群组指定接收与发送Artnet信号的域。
{kind=link}
5. 效果测试部分只是用来测试升降球的基本功能,确保可以正常运行。激活启用输出按钮后,点击固定颜色将会自动设置所有群组内的LED球为相应的颜色,你随时可以更改RGB这三个参数,它们的范围是0-1,右侧会实时显示更改结果。
点击颜色程序将会自动应用类似于MA效果曲线到升降球的颜色通道,你可以更改效果的图形周期,图形宽度,运行速度,速度为0时即可以暂停效果运行。
点击固定高度按钮,可以通过图形偏移与高度来结合调整升降球的高度,图形偏移为0时,高度滑块数值即升降球的运行高度,当然这个高度值并不是真正的实际高度,实际高度是需要结合上面的球组位置以及群组位置参数,如果调整高度为0即表示升降降到了最低位置,向上调整时如果数值超过升降球的行程则不会起作用。
当你点击升降程序按钮时则会自动应用效果曲线到升降通道,你可以调整图形偏移值即图形运行的中间值,结合图形幅度,图形周期,每周步数参数变化不同的效果。你也可以随时调整运行速度值为0以暂停效果运行。这在调试激光位置时升降球错落有致将更方便调整激光角度。
{kind=link}
6. 接下来我们可以设置一下激光灯的相关参数。在激光设置部分,横线分隔的第一部分为群组内的全局设置,跟踪开启激活后激光灯将会被分配对群组内所有升降球进行跟踪,如果你只想要每台激光追踪不同的升降球的话,不要激活这个选项。
选择开启按钮激活后就可以直接使用鼠标在三维视图中选择激光来为单个激光设置不同的参数。激活显示标签后,在三维视图中群组内每台激光的出光口上方将会显示它所处的群组以及自身编号。这样你就可以了解每台激光灯旋转状态。激光颜色部分即用来设置三维视图中激光灯的外壳颜色。激光亮度用于调整群组内激光灯的输出亮度,对于depence模拟的话,适当降低亮度值会更有表现力。激光角度这里根据你所使用激光灯的具体角度值进行调整,默认值为60度。
采样率同样根据具体使用激光的振镜扫描速率设置。步长值与点保持通常保持默认即可,步长值越小可以绘制的点数会更多,当然这个受具体激光灯的振镜扫描速率影响,点保持越大单点就更亮。这里的默认值是根据depence软件中的表现设置的,具体实际使用中,可以根据实际激光灯的表现进行调整。接下来部分,你可以使用激光+与激光-按钮来管理激光灯的数量,切换选择不同的激光灯可以设置不同的激光灯位置与旋转参数。在实际现场调试时先确定要激光振镜相对于坐标原点的三维位置,确定一个粗略的旋转角度值,现场的调试的话我们接下来就可以使用效果测试部分选项开启升降球或使用控台点亮升降球,然后在界面左侧单球设置中为每个球分配不同的激光,因为实际使用过程中有些升降球可能会被其它的升降球遮挡而不适合特定位置激光的追踪。具体就是就近原则来为每个升降球分配激光。当你在界面左侧激光设置部分关闭跟踪开启按钮时,记得在单球设置部分为需要跟踪的升降球开启这个跟踪启用按钮。
在单球设置部分,你也可以对单个LED球进行位置的微调,包括指定不同的DMX地址。这个要注意不要与其它地址冲突。分配好激光后,我们来激活Beyond开启按钮以发送跟踪点到Beyond,记得为每台激光灯设置不同的Zone。你可以点击激光设置部分中的查看视角按钮来激活相应激光灯的追踪视角,要确保这台激光灯所追踪的升降球在上下运行时都在它的追踪范围内,如果有超出的话,你就要再考虑重新设置激光灯的位置与角度。
在确定激光灯所追踪升降球都在它的视野范围内时,再对每台激光灯的角度进行调整以让现场激光追踪点对准每台升降球,这时升降球位置最好是随机的。以此类推,调整好每台激光的旋转角度后,我们就可以让升降球动起来,以此确定实际追踪的延时时间并进行微调以
确保实现最终完美追踪效果。
后续功能
当前软件实现的是核心的基础功能,后续会进一步优化增加更多的玩法效果。如升降球与激光颜色单独控制功能,升降球雷达交互功能等,也欢迎欢迎对此软件感兴趣的各位老师同行提供更好的建议。